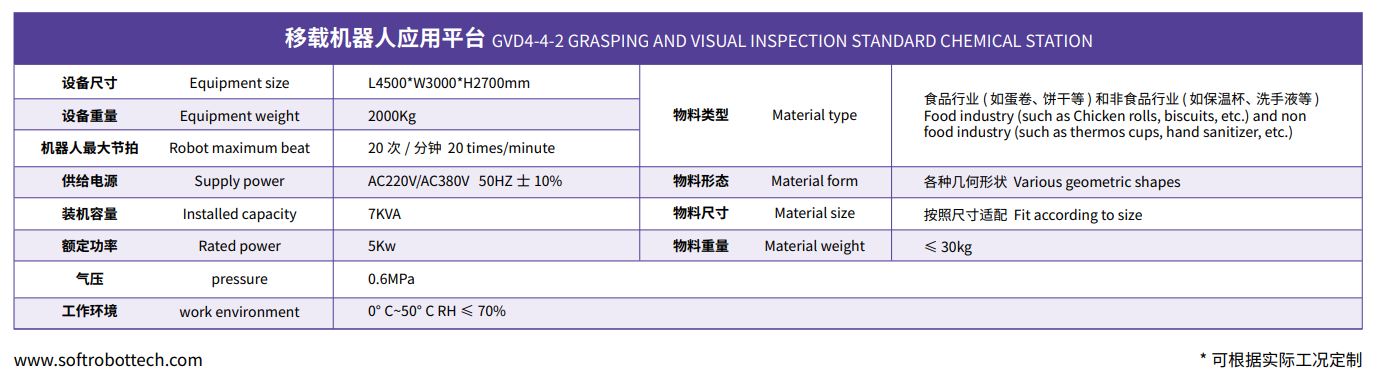
移载机器人应用平台
- 时间: 2023-11-13
- 访问量: 1022次

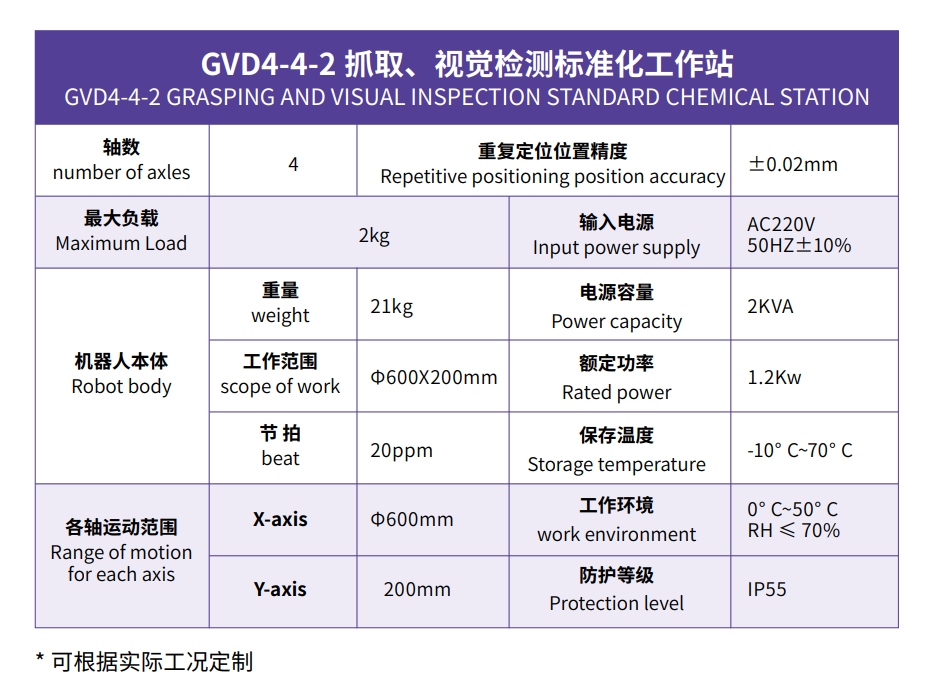
1.抓取、视觉检测标准化工作站
适应多种物料、抓手多样化
物料的抓手装置采用模块化设计,多套不同结构的抓手机 构适用于不同物料;抓手机构采用快速接口,更换快捷, 操作方便简单
物料投放位置准确、快速高效
采用 AI 深度学习检测算法与传统视觉算法相结合的方式进 行检测,主要用于检测放置在输送线上的物料位置,位置 合格的通过 SCARA 机器人抓取物料,放入到包装盒内;位 置不合格通过输送线进入到集料箱,由人工取出,调整好 物料位置并放入到输送线上再次使用;SCARA 机器人重复 定位精度可达 ±0.02mm,投放位置准确、快速高效
标准化设计、结构小巧
为了适用于不同的物料,整机采用标准化设计,各执行机
构可以实现快速换装,结构紧凑、设备小巧、移动和安装
方便,可以满足人工和自动化等多种上料需求

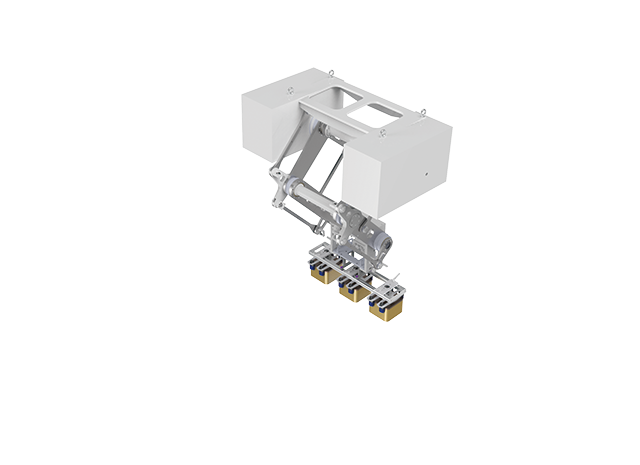
2.抓取、装载标准化工作站
适应多种物料、机构功能多样化
物料的抓手采用模块化设计,采用多套不同结构的抓手机构适用
于不同的物料,以满足物料在包装过程中如制盒、装盒、扣盒、
移载等不同功能的需求;抓手机构采用快速接口,更换快捷,操
作方便、简单。
组合式设计、空间利用率高
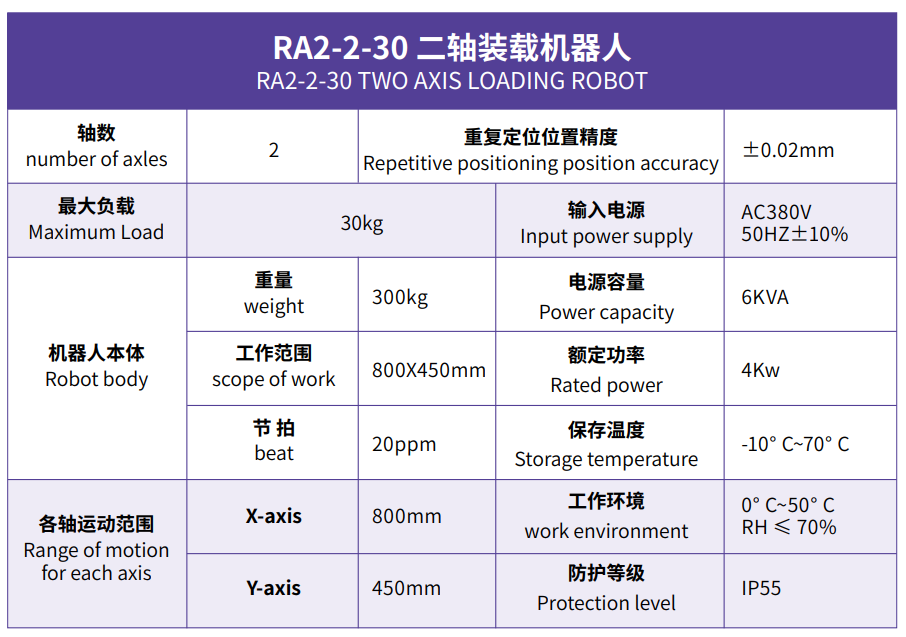
采用标准化框架,集合了气路、电路多种接口,二轴装载机器 人安装在框架顶部,占地面积小;机器人重复定位精度可达 ±0.20mm,投放位置准确、快速高效。
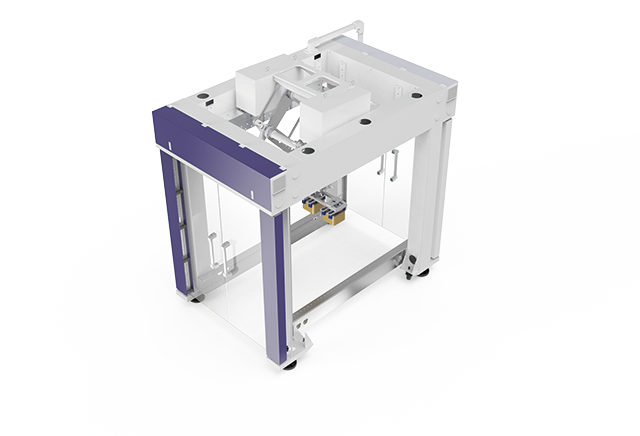
标准化设计、结构小巧
为了满足不同的物料的生产工艺,整机采用标准化设计,可以安
装实现物料输送、升降、移载等多种功能的机构的设备;直接安
装在设备底部的框架上,有气、电路安装和控制接口,可实现快
速安装;结构紧凑、设备小巧、移动和安装方便,可以单台或者
多台组合使用;装载机器人也可以根据生产工艺需要,采用定制
的方式安装在特定设备上使用。